计算机图形学入门IX
Ray Tracing 1 (Whitted-Style Ray Tracing)
一、概述
- 引入光线追踪的原因是光栅化很难做出效果好的全局效果,比如软阴影、全局照明
- 光线追踪也有一定的问题,最严重的问题是非常慢,光栅化常用于实时场景,光线追踪则更多应用于离线场景,因此两者并无替代关系而是相互独立的
二、基础光线追踪算法
- 关于光线的三个性质(理论)
- 光沿直线传播
- 光线之间不会发生碰撞
- 光线一定是从光源发射出来在环境中经过不断的反射到达观测点(人眼/摄像机)
- 点观察模型(Pinhole Camera Model)

- Whitted-Style 光线追踪(递归):将反射折射等全部累加起来得到最终的视觉图
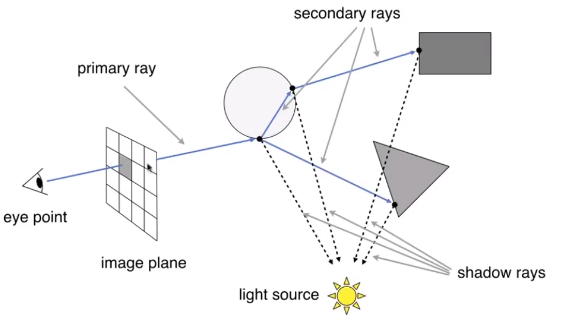
- shadow rays 用于判断可见性
- primary ray 初始光线
- secondary ray 折射反射后的次级光线
- 光线和物体表面的交点


分别设出光线与圆的方程,联立解出未知量 $t$ (传播时间)判断与圆的交点情况,将解出的$t$代回到光线方程中即可得到交点的具体数值- 封闭图形内射出的光线与图形的交点一定是奇数个(同理可以推广到三维情况下)
- 在图形学中通常忽略平行这种特殊情况(例如光线恰好经过某一平面)
- 特殊到光线与三角形的交点:通常先求出光线与三角形所在平面的交点,然后判断该交点是否在三角形内


- Moller Trumbore Algorithm:上述过程还是较为复杂,为了直接判断交点是否在三角形内,于是有了利用重心坐标求解的Moller Trumbore 算法($b1,b2,1-b1-b2$分别为重心坐标)

三、加速线面求交流程
- 包围盒(Bounding Volumes):用简单的物体包围复杂的物体那么对于光线来说,如果与包围盒都没有交点的话就不用说与被包围的物体了
- Axis-Aligned Bounding Box(AABB):轴对齐包围盒
- 以二维情况为例,可以计算出光线出入x,y两个对面的时间以及交点,求交集即可得到最终光线与盒子的交点与时间

- 推广到三维情况就是x,y,z三个对面,同理光线同时进入三个对面则称光线进入包围盒,光线射出任意一个对面则称光线离开包围盒
- $t_{enter} = max{t_{min}}$
- $t_{exit} = min{t_{max}}$
- 如果 $t_{enter} < t_{exit}$,则称光线在盒子中停留过一段时间,反之则称光线未进入盒子
- 如果 $t_{exit}<0$,显然不存在交点
- 如果 $t_{enter} < 0 \ &\ t_{exit}>=0$,可以想象到光在盒子里出发,则一定有交点
综上所述,光线与AABB模型有交点当且仅当$t_{enter} < t_{exit} \ &&\ t_{exit}>=0 $
(下接 计算机图形学入门X)

计算机图形学入门IX
https://baifabaiquan.cn/2021/03/18/计算机图形学入门IX/