计算机图形学入门XVIII
Animation(simulation)
一、概述
- Keyframe Animation:关键帧动画
- Animator(eg:lead animator) 创建关键帧
- Assistant(other person or computer) 创建中间帧
中间值通过插值计算得到
- Physical Simulation:物理仿真模拟
- Mass-Spring System:质点弹簧系统
- 结构弹簧(struct spring)
- 剪应弹簧(shear spring)
- 弯曲弹簧(bend spring)
- 阻尼系数(damp)
- Particle System:粒子系统
对于动画中的每一帧:- 如果需要,创建新的粒子
- 计算每个粒子的受力
- 改变每个粒子的速度和位置
- 如果需要,移除死亡粒子
- 渲染粒子
- 正运动学(Forward Kinematics):描述一种骨骼系统来模拟人体
- Pin(1D rotation)
- Ball(2D rotation)
- Prismatic joint(translation)
- 联动计算
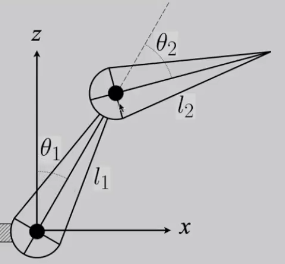
$$
p_z = l_1 cos(\theta_1) + l_2 cos(\theta_1 + \theta_2)
\\
p_x = l_1 sin(\theta_1) + l_2 sin(\theta_1 + \theta_2)
$$
逆运动学(Inverse Kinematics):给定一个确定运动,如何计算运动过程
Rigging:一种更高级别的控制,它允许对姿态、形变、表情等进行直观的修改
Blend Shapes:表情和骨骼动画混合
Motion Capture:动作捕捉
二、
1.Single Particle Simulation
欧拉方法(线性模型)
$$
x^{t+\Delta t} = x ^ t + \Delta t \dot x^t
\\
\dot x^ {t + \Delta t} = \dot x ^ t + \Delta t \ddot x^t
$$
该方法稳定性较差,误差会随着时间递增中点法(平方级模型)
$$
x_{mid} = x(t) + \Delta t/2 \cdot v(x(t),t)
\\
x(t + \Delta t) = x(t) + \Delta t \cdot v(x_{mid},t)
$$修正后的欧拉方法
$$
x^{t+ \Delta t} = x ^ t + \frac{\Delta t}{2}(\dot x ^ t + \dot x ^{t+\Delta t})
\\
\dot x ^ {t + \Delta t} = \dot x ^ t + \Delta t \ddot x ^ t
\\
x ^ {t + \Delta t} = x ^ t + \Delta t \dot x ^ t + \frac{(\Delta t)^2}{2} \ddot x ^ t
$$隐式欧拉方法
$$
x ^ {t + \Delta t} = x ^ t + \Delta t \dot x ^ {t + \Delta t}
\\
\dot x ^ {t + \Delta t} = \dot x ^ t + \Delta t \ddot x ^ {t + \Delta t}
$$龙格库塔方法(Runge-Kutta)
详见数值分析课本XD刚体模拟(Rigid Body Simulation)
$$
\frac{d}{dt}
\begin{pmatrix}
X\\
\theta\\
\dot X\\
\omega
\end{pmatrix}\begin{pmatrix}
\dot X\\
\omega\\
F/M\\
\Gamma / I
\end{pmatrix}
$$- $X$:positions
- $\dot X$:acceleration
- $\theta$:rotation angle
- $\omega$:angular velocity
- $F$:force
- $\Gamma$:torque
- $I$:momentum of inertia
2.Fluid Simulation
- 先给出一个简单的模型:将整个水体看做是数量众多的不可压缩的刚体小球组成,当水体某处的小球密度发生改变,则考虑如何使之恢复,这一过程就是在模拟流体流动(梯度下降法(gradient descent))
- 对于模拟大型集合物体的两种不同方法:
- Lagrangian Approach(拉格朗日法/质点法)
- Eulerian Approach(欧拉方法/网格法)